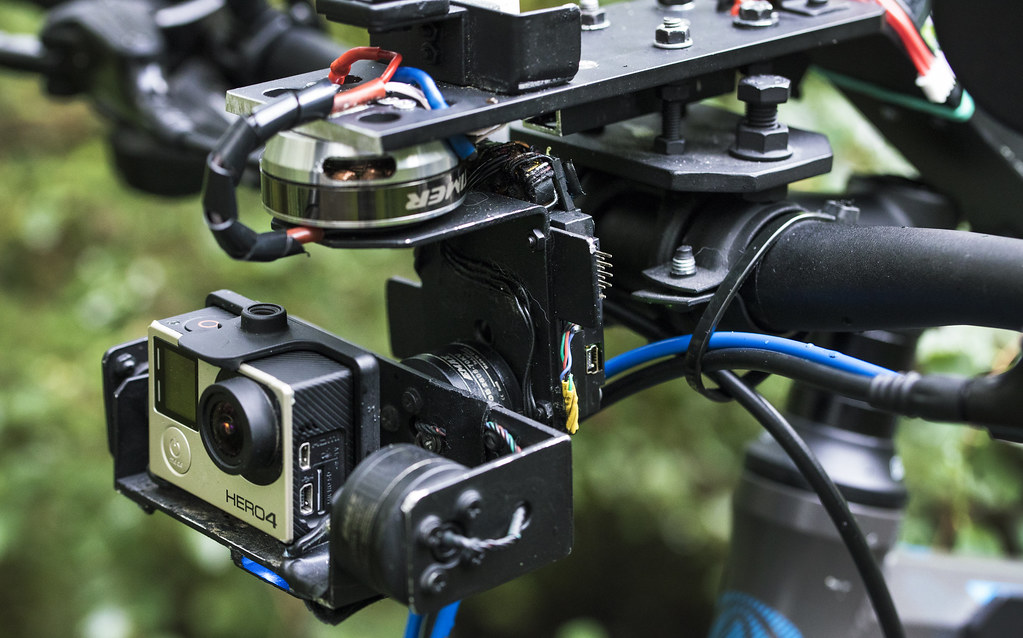
После столь долгого перерыва, меня что то потянуло на свой конструктор. ТО что на фото это в скором будущем (дело трёх- четырёх дней) получиться двух осевая система стабилизации для удалённого контроля. Ни когда не думал, что такое буду делать, но вот, понадобилось. При том все детали были давно сделаны и успешно забыты, в виду того что просто перегорел, куча других дел, итд. А теперь - собрал в полне очень даже живой аппарат. Без энкодеров конечно, но тут они не особо нужны.
Осталось совсем немного. Механика собрана, осталось только некоторые трубки заменить, но как уже писал - посылка в пути.
Решаю вопрос с электроникой, но сначала, хочу предварительно понять:
1. как подключить джойстик, который шёл в специальном футляре именно для гимбалов
2. как подключить передатчик к плате алексмос?.
Добавлю, что плату вроде бы оригинальную снял с полурабочего стедикама... Но это длинная история, фото его пришлю чуть позже, сохранил. Может кто то один из Вас собирал питерскому оператору этот стедикам.
Сейчас важно решить два вопроса важных. И вот, пока писал, появился третий.
3. НА плате есть разъем для подключения кнопки. Этот разъем дублирует кнопку, которая находится на самой плате??
Или она дублирует переключения режимов стедикама, и дублирует переключение на джойстике?
Ну и написал!)) Надеюсь, что ветка живая, и кто то ещё может мне помочь советом)))
Ещё добавил фото. Вот такой приёмник.
Я вот не знаю, сколько он может к себе подключить передатчиков? Только один наверное?
Хочется сделать вещь, которая будет очень плавно регулировать поворот, в основном это касается поворота вправо и влево (яв)
Ось питч тоже будет задействована разумеется. и она также должна работать плавно, тем более, когда на борту будет стоять какой нибудь объектив с эквивалентным фокусным в 135мм,
Ну это так, отступление от верхнего поста.
Если кому то не удобно писать тут то можем списаться вконтиакте)
https://vk.com/arthur_gerd
Прикрепленные файлы
-
 IMG_0748.JPG 112,39К
1 Количество загрузок:
IMG_0748.JPG 112,39К
1 Количество загрузок:
-
IMG_0746.JPG 215,95К
1 Количество загрузок:
-
IMG_0743.JPG 157,52К
1 Количество загрузок:
-
IMG_0725.JPG 128,49К
1 Количество загрузок:
-
IMG_0738.JPG 134,07К
1 Количество загрузок:
-
IMG_0742.JPG 203,1К
1 Количество загрузок: